Un team di ricercatori ha realizzato presso l’Istituto Italiano di Tecnologia il primo cane-robot ad acqua: cammina, salta, corre, si solleva ed evita gli ostacoli
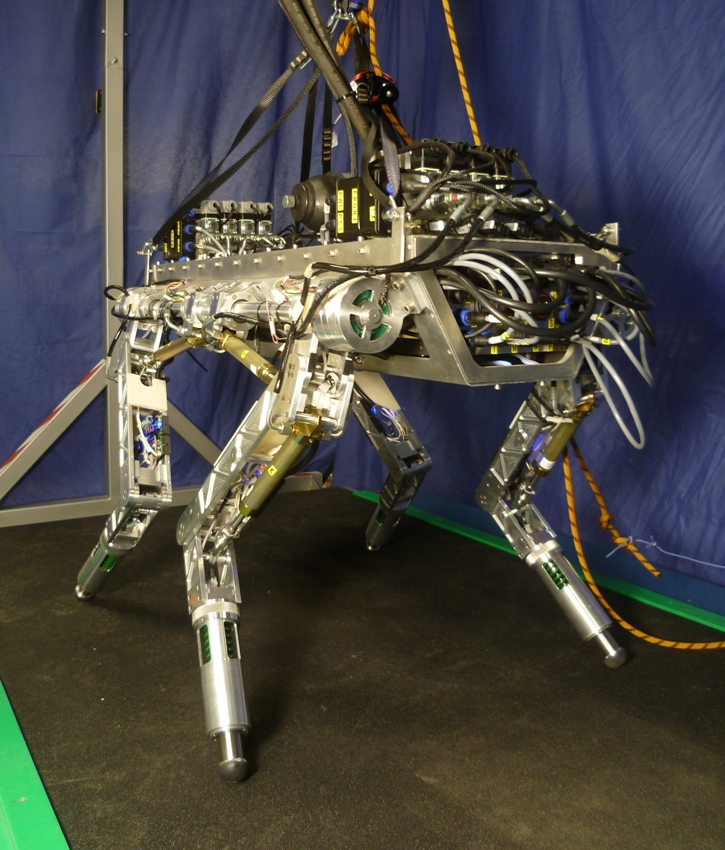
 Il migliore amico dell’uomo, si sa, è il cane. Ma se l’amico in questione fosse un robot? Potrebbe nascere lo stesso feeling che nasce con i cuccioloni di pelo? Sicuramente non potremo saperlo adesso, ma in un imminente futuro si. In Italia è stato realizzato il primo robot quadrupede di circa 75 chili, dal corpo in alluminio lungo 1 metro, capace di camminare, correre, saltare, di sollevarsi sulle zampe posteriori e di scavalcare gli ostacoli non appena la zampa li percepisce, evitando così di inciampare. Il suo nome è HyQ ed è stato sviluppato nel dipartimento di Advanced Robotics dell’Istituito Italiano di Tecnologia coinvolgendo un team internazionale di ricercatori guidati dallo svizzero Claudio Semini.
Il migliore amico dell’uomo, si sa, è il cane. Ma se l’amico in questione fosse un robot? Potrebbe nascere lo stesso feeling che nasce con i cuccioloni di pelo? Sicuramente non potremo saperlo adesso, ma in un imminente futuro si. In Italia è stato realizzato il primo robot quadrupede di circa 75 chili, dal corpo in alluminio lungo 1 metro, capace di camminare, correre, saltare, di sollevarsi sulle zampe posteriori e di scavalcare gli ostacoli non appena la zampa li percepisce, evitando così di inciampare. Il suo nome è HyQ ed è stato sviluppato nel dipartimento di Advanced Robotics dell’Istituito Italiano di Tecnologia coinvolgendo un team internazionale di ricercatori guidati dallo svizzero Claudio Semini.
HyQ – che sta per “Hydraulic Quadruped” – è un robot quadrupede i cui arti sono mossi da attuatori idraulici in acciaio che gli conferiscono molta forza. Gli arti idraulici – spiega l’IIT – riescono a muoversi in modo preciso, coordinato e continuo, grazie alla presenza di sensori di posizione e di forza e di un software di controllo. HyQ è uno dei pochi robot quadrupedi al mondo che riesce a compiere movimenti veloci e precisi nello stesso tempo. Non è infatti il primo robot-cane ad essere stato realizzato nel mondo, ma la sua tecnica è sicuramente innovativa. E’ munito di sensori di forza alle estremità degli arti che gli permettono di percepire la forza esercitata sul terreno; tali sensori gli conferiscono la capacità di riconoscere lo stato del terreno sul quale si muove e la sua consistenza, così da potere adeguare il suo movimento.
 Le soluzioni ingegneristiche applicate su HyQ sono ispirate dalla conformazione anatomica di alcuni quadrupedi presenti in natura, quali cavallo, cane e stambecco.
Le soluzioni ingegneristiche applicate su HyQ sono ispirate dalla conformazione anatomica di alcuni quadrupedi presenti in natura, quali cavallo, cane e stambecco.
Il progetto inizia nel 2007 come una tesi di dottorato, che, grazie a diversi studi, esperimenti con prototipi e una progettazione durati tre anni, è terminata nel 2010 con la realizzazione della prima versione del robot. L’ideazione e la messa in atto del software di controllo del movimento di HyQ è stato realizzato in un secondo momento.
Attualmente i ricercatori stanno andando avanti con il proprio progetto e si stanno impegnando a sviluppare un apparato di sensori che permettano ad HyQ di analizzare e riconoscere l’ambiente circostante, come per esempio laser 3D e videocamere stereo incorporate, per captare i suoni esterni e vedere la prospettiva e la tridimensionalità della realtà. HyQ è principalmente pensato per scopi di ricerca in ingegneria, biomeccanica e robotica. In futuro gli impieghi di questo tipo di robot potranno essere diversi, ad esempio potrà sostituire l’uomo in situazioni di estrema emergenza o in luoghi pericolosi o difficili da raggiungere, ad esempio per operazioni di salvataggio. Potrebbe essere utilizzato inoltre anche per le operazioni di perlustrazione di zone remote, di edifici crollati, di ambienti contaminati come centrali nucleari o industrie chimiche, e quindi per il supporto a squadre di emergenza come vigili del fuoco e protezione civile. L’IIT ha recentemente venduto una copia del robot HyQ all’Agile and Dexterous Robotics Lab dell’ETH di Zurigo. Gli amici dei cani “umani” possono quindi stare tranquilli; il cane robot non andrà a sostituire i nostri amati cuccioli in carne ed ossa, ma sarà impiegato per particolari operazioni “estreme”.
 Vuoi ricevere le notifiche sulle nostre notizie più importanti?
Vuoi ricevere le notifiche sulle nostre notizie più importanti?