








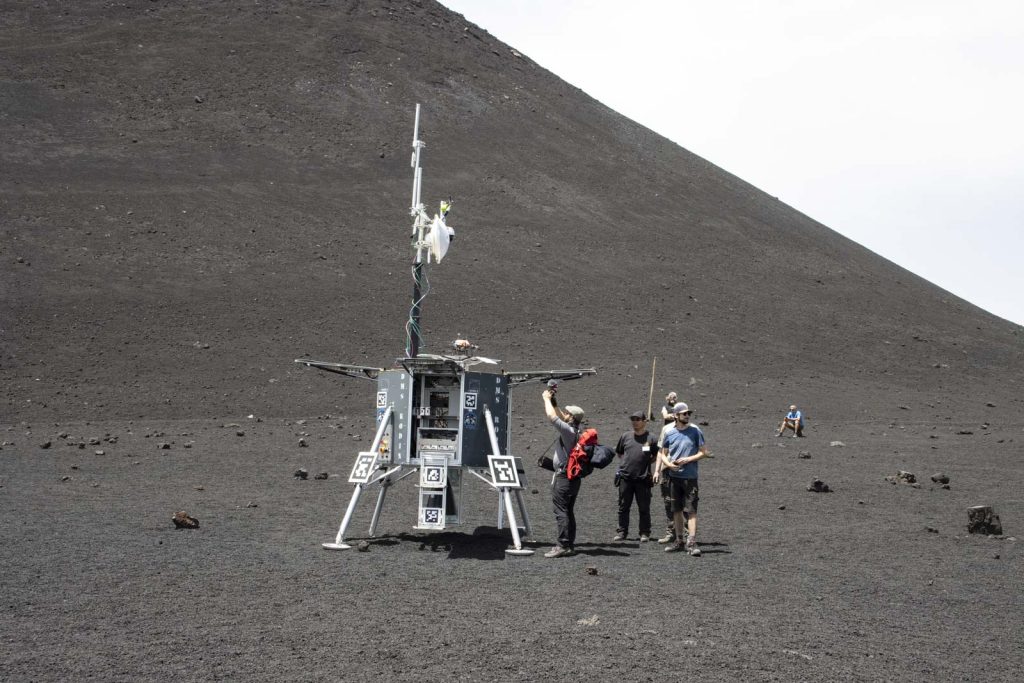













La simulazione denominata ARCHES Space-Analog Demonstration, in corso sull’Etna fino al 9 luglio 2022, è stata organizzata dal Centro aerospaziale tedesco (Dlr) con un’importante partecipazione dell’Agenzia Spaziale Europea (ESA). La missione analogica mostrata allo Space-Demomission si compone di tre parti singole, che scientificamente si concentrano sulla ricerca geologica e sulla radioastronomia, ovvero gli scenari rilevanti per le future attività di esplorazione.
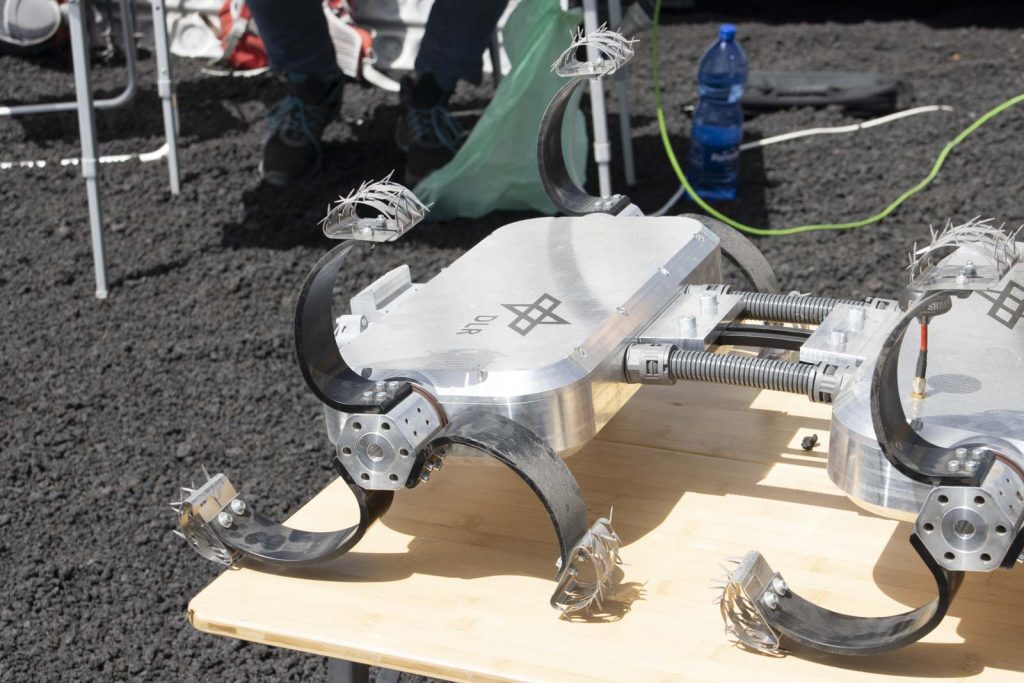
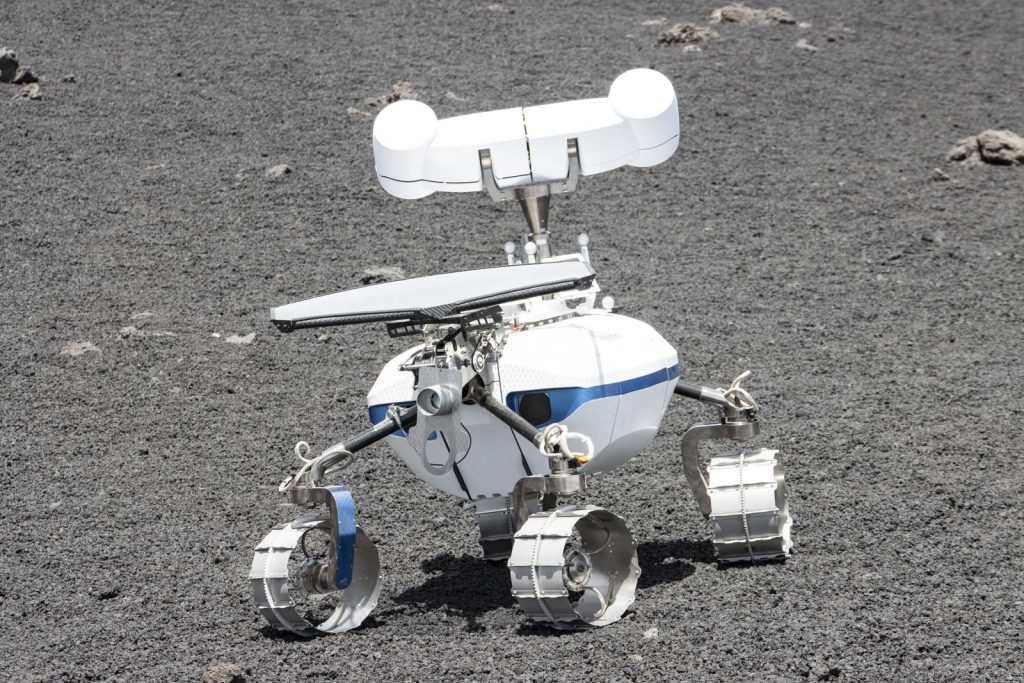
I primi due scenari della missione prendono in esame gli aspetti tecnici e operativi dell’analisi geologica in situ e la restituzione del campione. Il primo scenario (GEO I) si concentra su un team eterogeneo cooperativo di sistemi a due ruote (LRU1 e LRU2) e un drone volante (ARDEA) che esplora in modo completamente autonomo i siti di interesse ed esegue imaging spettrale remoto scientificamente attivato, spettroscopia LIBS e selezione del campione, analisi e compiti di raccolta, rispettivamente controllati da un centro operativo di missione presso l’hotel congressuale di Catania.
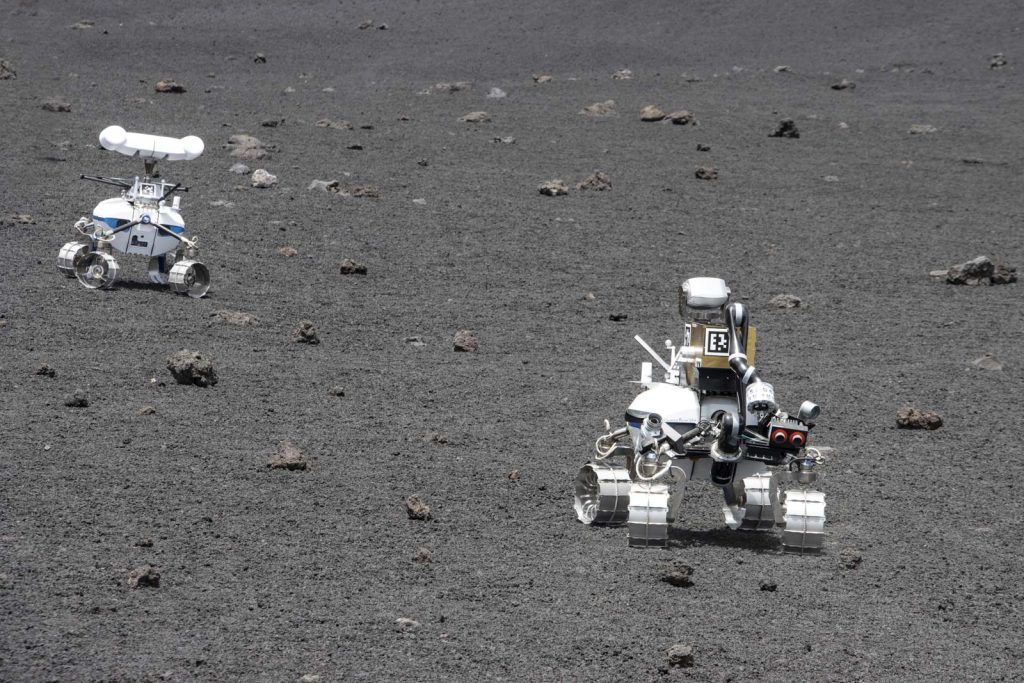
Nel secondo scenario (GEO II) il rover Interact dell’ESA monitora i siti sotto la supervisione di una sala di controllo dell’ESOC (European Space Operations Centre) a Darmstadt, in Germania, ed è controllato dal centro di controllo della missione a Catania. Un astronauta addestrato interagisce con i team operativi e scientifici in una sala di controllo sulla Terra, mentre un rover altamente qualificato è controllato a distanza con un braccio robotico. L’autonomia condivisa con feedback visivo e tattile viene utilizzata per migliorare le capacità dell’astronauta nell’utilizzo del rover. Inoltre, il rover Scout fornisce i collegamenti di comunicazione necessari per il feedback tattile dal rover Interact durante la teleoperazione.
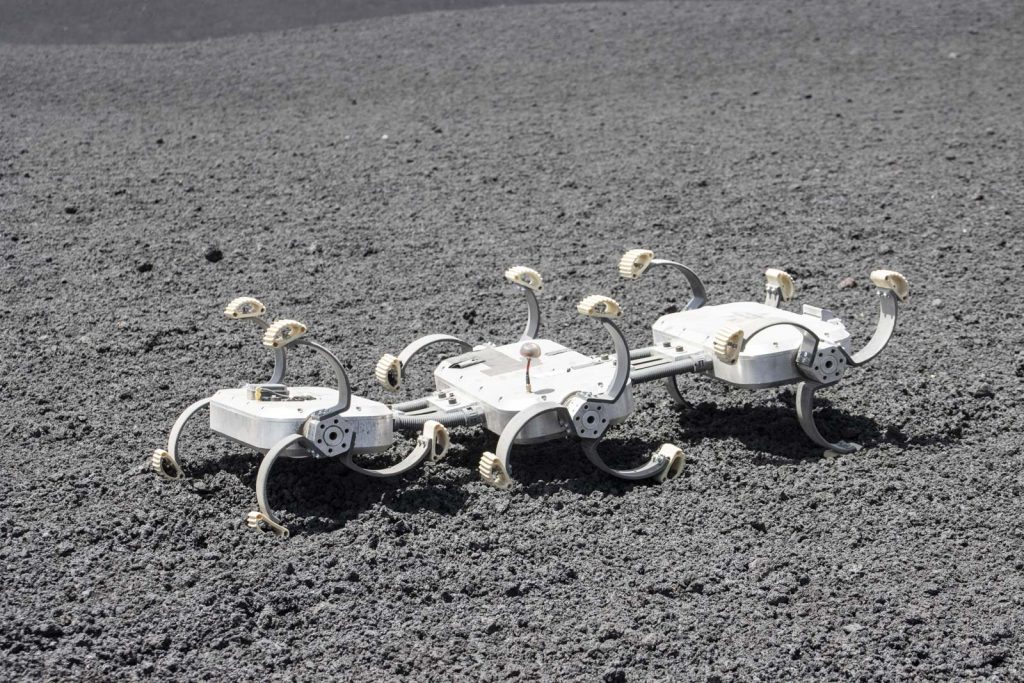
Il terzo scenario (LoFar) mostra l’installazione e la manutenzione di un vettore di antenne radio a bassa frequenza utilizzando i rover LRU e il drone ARDEA. Questo scenario corrisponde anche all’idea scientifica di lunga data di installare un’antenna a bassa frequenza sul lato opposto della Luna, che dovrebbe permettere approfondimenti e indagini nello Spazio. Il vettore utilizzato in questo progetto è costituito da quattro elementi di antenna funzionali e incorpora una nuova tecnica per il posizionamento preciso basata sulla comunicazione radio.
Il rover Interact
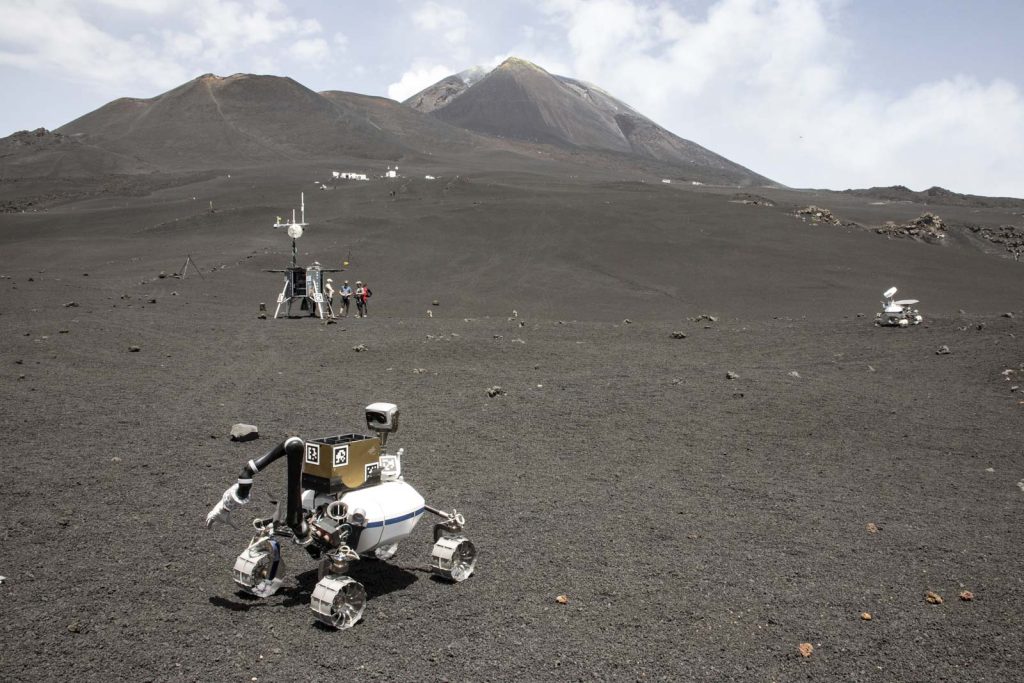
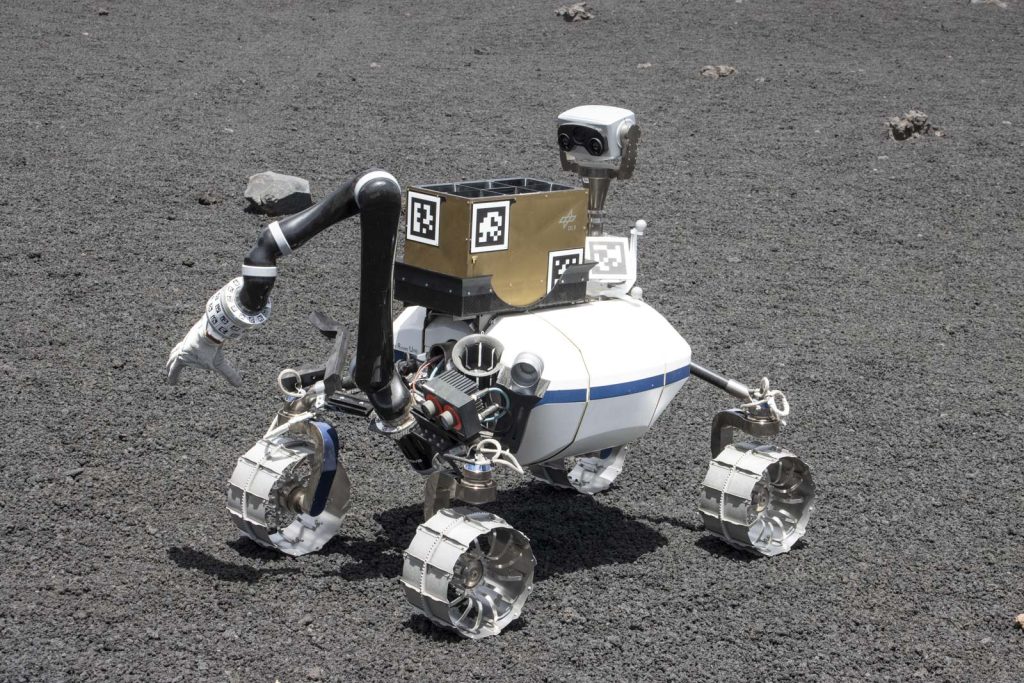
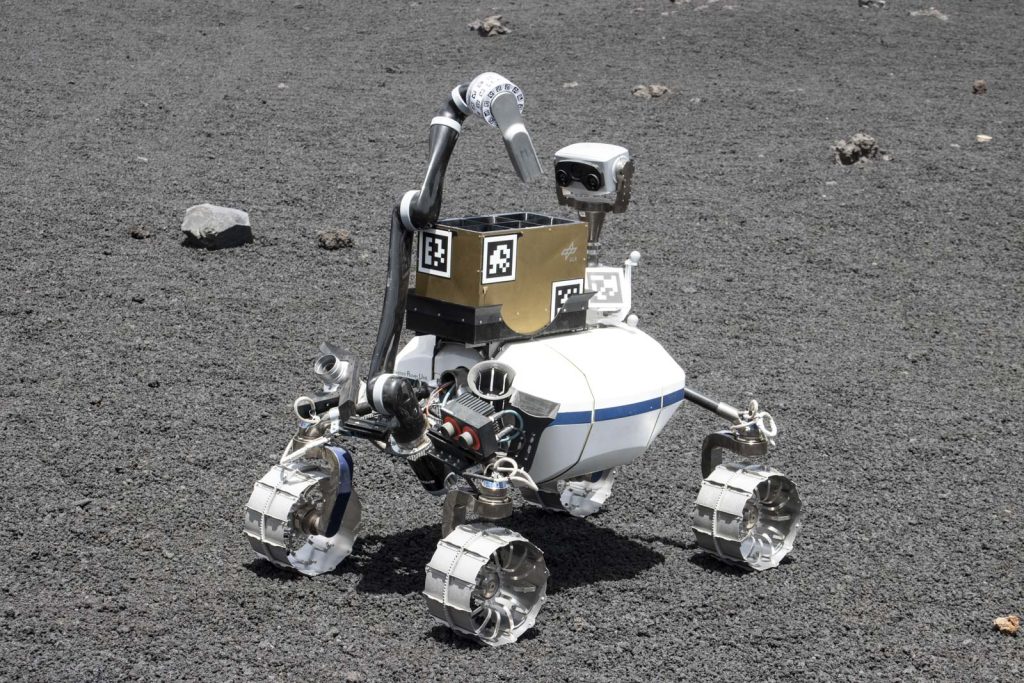
E’ lui il protagonista principale di ARCHES: il rover Interact, ovvero il rover autonomo dell’Agenzia Spaziale Europea (Esa), che dovrà raccogliere campioni sul nostro satellite. La simulazione permetterà di verificare il funzionamento del robot in vista della futura stazione spaziale lunare Gateway. A telecomandare il rover è l’astronauta dell’Esa Thomas Reiter.
Già nel 2019 il rover Interact era stato controllato dall’astronauta dell’Esa Luca Parmitano direttamente dalla Stazione Spaziale Internazionale (Iss). Da allora, però, Interact è cresciuto e si è evoluto, con diversi aggiornamenti che gli permetteranno di resistere meglio agli ambienti esterni ed estremi. Si tratta di una tipologia di robot autonomo, che vede l’utilizzo e la concretizzazione di una tecnologia chiave per il futuro della tecnologia, destinata a diventare cruciale per condurre ricerche in ambienti difficili, nello Spazio ma anche sulla Terra. Basti pensare che Interact potrà anche esplorare, senza danni o conseguenze, le profondità marine.
Il rover Interact pesa circa 300 chilogrammi e non si limita a fotografare l’ambiente che lo circonda: possiede infatti dei sensori di ultima generazione che permettono agli astronauti di sperimentare la superficie del pianeta esattamente allo stesso modo del rover, fornendo persino la sensazione del peso e della composizione delle rocce che tocca.
 Vuoi ricevere le notifiche sulle nostre notizie più importanti?
Vuoi ricevere le notifiche sulle nostre notizie più importanti?