Con l’avvento delle tecnologie di guida autonoma, la percezione visiva delle auto ha assunto un ruolo cruciale per garantire sicurezza e affidabilità durante la guida. L’interpretazione accurata dell’ambiente circostante e la capacità di reagire prontamente ai cambiamenti sono fondamentali per il successo di questa innovazione nel settore automobilistico. Recentemente, due studi pubblicati su Nature hanno introdotto nuove tecnologie ottiche che promettono di rivoluzionare la percezione visiva delle auto autonome, aprendo la strada a una nuova era di sicurezza stradale e prestazioni avanzate.
Chip di sensibilità visiva Tianmouc
Il primo studio, guidato dal ricercatore Luping Shi e il suo team, ha presentato un chip di sensibilità visiva denominato Tianmouc. Questo chip, ispirato al funzionamento del sistema visivo umano, è stato progettato per combinare una rapida ma imprecisa rilevazione degli eventi con un’elaborazione più lenta ma accurata delle immagini. L’obiettivo è fornire una visione dettagliata della scena in tempo reale, consentendo alle auto autonome di reagire prontamente ai cambiamenti ambientali senza compromettere la qualità dell’immagine. Il team di ricerca ha condotto una serie di test approfonditi per valutare le prestazioni del chip in una varietà di scenari realistici, tra cui la guida notturna e la rilevazione di ostacoli in movimento. I risultati hanno dimostrato che il chip Tianmouc offre una robusta e affidabile percezione visiva, aprendo la strada a nuove possibilità per il miglioramento della guida autonoma.
Telecamere ibride per il rilevamento visivo delle auto a guida autonoma
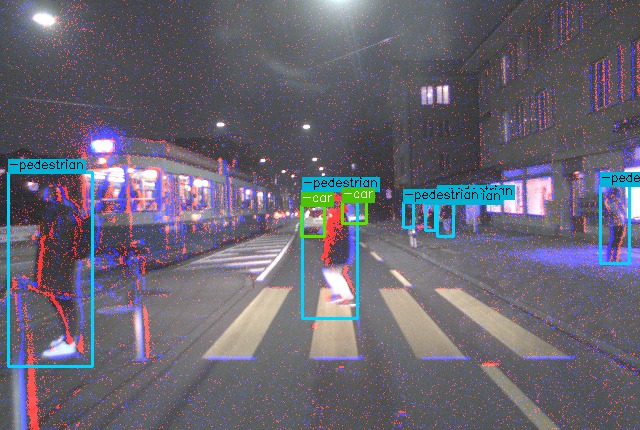
Il secondo studio, condotto da Daniel Gehrig e Davide Scaramuzza, si è concentrato sullo sviluppo di telecamere ibride per il rilevamento visivo. Le tradizionali fotocamere a colori offrono una risoluzione eccellente, ma richiedono una considerevole quantità di elaborazione dei dati, che può portare a una maggiore latenza e compromettere la sicurezza della guida autonoma. D’altra parte, le telecamere degli eventi sono in grado di rilevare rapidi cambiamenti, ma con una minore precisione. Per superare queste sfide, Gehrig e Scaramuzza hanno proposto un sistema ibrido che combina il meglio delle due tecnologie. Integrando telecamere a colori con telecamere degli eventi, il sistema è in grado di mantenere un rilevamento preciso degli oggetti con una latenza ridotta, consentendo alle auto autonome di reagire prontamente a situazioni di pericolo.
 Vuoi ricevere le notifiche sulle nostre notizie più importanti?
Vuoi ricevere le notifiche sulle nostre notizie più importanti?