La transizione evolutiva dall’acqua alla terraferma rappresenta uno dei capitoli più affascinanti e cruciali nella storia della vita sul nostro pianeta. Per comprendere come le prime creature acquatiche siano riuscite a muoversi su un terreno solido milioni di anni prima dello sviluppo di arti specializzati, la scienza sta oggi attingendo a uno strumento inaspettato: la robotica bio-ispirata. Un innovativo studio pubblicato sulla prestigiosa rivista scientifica Nature Communications ha gettato nuova luce su questo mistero evolutivo. Coordinato dal ricercatore Michael Ishida e da un team internazionale di scienziati, lo studio ha dimostrato come la cinematica di diverse specie di pesci moderni capaci di muoversi fuori dall’acqua possa essere ridotta a principi meccanici universali. Attraverso la creazione di modelli digitali e la successiva costruzione di un robot fisico, gli esperti hanno svelato che l’efficacia del movimento terrestre non dipende necessariamente da una complessa anatomia muscolo-scheletrica, bensì da una coordinazione geometrica sorprendentemente semplice ed efficiente.
Il mistero del passo a treppiede ondulatorio
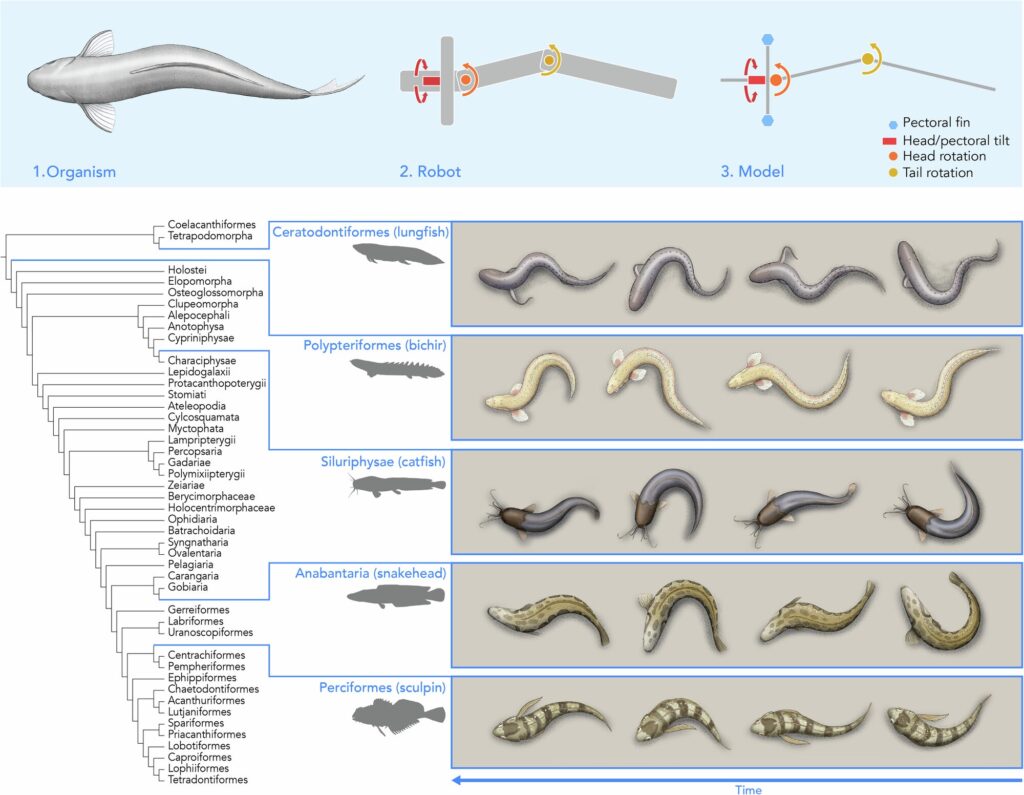
Molte specie di pesci attuali, appartenenti a gruppi filogeneticamente distanti tra loro come il poliptero grigio (Polypterus senegalus), il pesce polmonato africano (Protopterus annectens), il pesce gatto corazzato, la testa di serpente settentrionale (Channa argus) e lo scazzone (Oligocottus maculosus), mostrano la straordinaria capacità di camminare sulla terraferma. Nonostante le profonde differenze nella forma del corpo e delle pinne, queste creature adottano una strategia di locomozione terrestre sorprendentemente analoga. Gli autori dello studio hanno formalizzato questo schema motorio comune definendolo “passo a treppiede ondulatorio“. Questo movimento si basa sulla combinazione coordinata di due azioni principali: un’azione di puntellamento generata da una parte anteriore del corpo, come le pinne pettorali o la testa, e un’azione di spinta propulsiva prodotta dalla parte posteriore attraverso l’ondulazione della colonna vertebrale e della regione caudale. Durante la camminata, il pesce alterna il lato del corpo che fa contatto con il terreno, sfruttando le forze di reazione del substrato per far ruotare la propria struttura attorno al perno anteriore piantato al suolo, mantenendo costantemente tre punti di contatto chiave con la superficie per garantire il proprio avanzamento.
Dal modello matematico al robot fisico per convalidare l’evoluzione
Per testare la validità e la flessibilità di questo meccanismo, il team di ricerca ha sviluppato un modello computazionale semplificato basato sulle analisi cinematiche ad alta velocità del poliptero grigio, utilizzato come esemplare di riferimento per il passo a treppiede. Nel modello matematico, il corpo flessibile del pesce è stato approssimato a tre segmenti rigidi collegati da giunti rotanti con un rapporto di lunghezza specifico, mentre le pinne pettorali sono state rappresentate come una barra rigida che alterna il contatto con il suolo sui lati destro e sinistro. Le simulazioni hanno rivelato che le massime prestazioni di velocità si ottengono con parametri di movimento che ricalcano quasi perfettamente quelli osservati in natura nel poliptero grigio, confermando l’ottimizzazione biologica della specie. Successivamente, gli scienziati hanno tradotto il modello virtuale in un robot fisico autonomo e stampato in 3D, dotato di motori servo e di una propria fonte di alimentazione interna, per verificare il comportamento del sistema nel mondo reale. Sia la simulazione che il robot hanno confermato che il passo a treppiede ondulatorio rimane pienamente funzionale ed efficace attraverso un’ampia varietà di proporzioni corporee, dimostrando la robustezza intrinseca di questa strategia motoria.
Una convergenza dettata dalla fisica e non dall’antenato comune
Uno degli aspetti più interessanti emersi dalla ricerca è che la somiglianza nei modi di camminare di questi pesci non deriva da un patrimonio genetico condiviso o da un antenato comune recente. Si tratta invece di un classico esempio di convergenza evolutiva, in cui specie distanti sviluppano soluzioni identiche per rispondere alle medesime sfide ambientali. Quando un organismo prevalentemente acquatico si trova a muoversi sulla terraferma, deve fare i conti con la forza di gravità e con la necessità di generare una spinta in avanti sfruttando l’attrito con il terreno anziché l’idrodinamica dell’acqua. Il passo a treppiede ondulatorio risponde perfettamente a questi vincoli meccanici imposti dall’interazione tra il corpo e il substrato. La sua straordinaria semplicità offre notevoli vantaggi energetici, poiché riduce al minimo il bisogno di un controllo motorio fine o di una forza elevata da parte delle pinne anteriori, affidandosi principalmente a forze di reazione passive e a traiettorie articolari a bassa complessità. Questa efficacia meccanica spiega perché la selezione naturale abbia premiato ripetutamente lo stesso schema di movimento in contesti ecologici differenti, come l’evasione dai predatori o lo spostamento tra pozze di marea.
Riscrivere la storia della transizione dall’acqua alla terraferma
La scoperta di questi principi meccanici universali condivisi da specie morfologicamente diverse ha implicazioni profonde per la paleontologia e per la comprensione dei primi vertebrati terrestri. Specie fossili transizionali celebri come il Tiktaalik roseae, vissuto nel Devoniano, possedevano robusti cingoli pettorali e pinne flessibili, ma erano del tutto prive degli arti sviluppati e delle dita caratteristiche dei tetrapodi successivi. Gli scienziati ipotizzano ora che proprio il Tiktaalik e altri taxa correlati si muovessero sulla terraferma sfruttando il passo a treppiede ondulatorio, muovendo il corpo grazie all’oscillazione assiale dello scheletro e usando le pinne anteriori come perni di ancoraggio stabili. La robotica bio-ispirata ha permesso così di esplorare scenari biomeccanici impossibili da osservare direttamente nei fossili, dimostrando che l’evoluzione verso la vita terrestre potrebbe essere iniziata non con una radicale innovazione anatomica degli arti, ma attraverso il semplice riadattamento funzionale della flessibilità del corpo alle rigide leggi della fisica terrestre.
 Vuoi ricevere le notifiche sulle nostre notizie più importanti?
Vuoi ricevere le notifiche sulle nostre notizie più importanti?