È stato il Festival dello Spazio di Busalla, in provincia di Genova, il palcoscenico scelto per la prima presentazione pubblica di ROSAIA, acronimo di “RObot parallelo continuo a Smorzamento Attivo su Intelligenza Artificiale”. Si tratta di un sistema robotico multibraccio coordinato e gestito nelle operazioni attraverso l’intelligenza artificiale, progettato per aprire nuove prospettive nello sviluppo della robotica spaziale di nuova generazione. La notizia centrale riguarda il debutto di un prototipo pensato per affrontare alcune delle sfide più delicate delle attività in orbita: avvicinarsi, agganciare, ispezionare e manipolare satelliti, oggetti non cooperativi o detriti spaziali in condizioni estreme. Il progetto è finanziato dall’Agenzia Spaziale Italiana, ASI, e realizzato dall’Istituto Italiano di Tecnologia, IIT, con l’obiettivo di studiare e sviluppare un robot spaziale capace di combinare flessibilità meccanica, assorbimento degli urti e autonomia operativa basata sull’IA.
Un robot spaziale di nuova generazione per l’In-Orbit Servicing
ROSAIA nasce per rispondere alle esigenze delle operazioni e delle attività in orbita, note come In-Orbit Servicing. Questi sistemi devono funzionare in condizioni estremamente complesse, tra cui la microgravità, l’assenza di attrito e la necessità di controllare con precisione la velocità e l’assetto sia del veicolo sia dell’oggetto da manipolare. L’ambiente spaziale rende particolarmente difficile qualsiasi intervento su oggetti in orbita. La manipolazione può riguardare elementi controllati, come i satelliti operativi, oppure oggetti incontrollati, come i detriti spaziali o i satelliti non più funzionanti. In questo scenario, la capacità di un sistema robotico di assorbire gli impatti e adattarsi al contatto con il target diventa un fattore cruciale per la sicurezza delle manovre.
ASI e IIT insieme per il progetto ROSAIA
Il progetto ROSAIA è finanziato dall’Agenzia Spaziale Italiana e realizzato dall’Istituto Italiano di Tecnologia, con il coinvolgimento dell’Industrial Robotics Facility dell’IIT di Genova. A presentare il prototipo durante il Festival di Busalla, a Genova, sono stati la Project Manager di ASI Orietta Lanciano e il Project Manager per IIT Ferdinando Cannella, a capo dell’Industrial Robotics Facility dell’IIT di Genova. La collaborazione tra ASI e IIT punta allo studio e allo sviluppo di un robot spaziale di nuova generazione, in grado di comportarsi come un manipolatore flessibile e di assorbire gli urti sia in modalità attiva sia in modalità passiva. L’uso dell’intelligenza artificiale aggiunge al sistema la capacità di gestire in modo autonomo le operazioni alle quali potrà essere applicato.
Bracci flessibili e smorzamento attivo per aggancio, ispezione e manutenzione
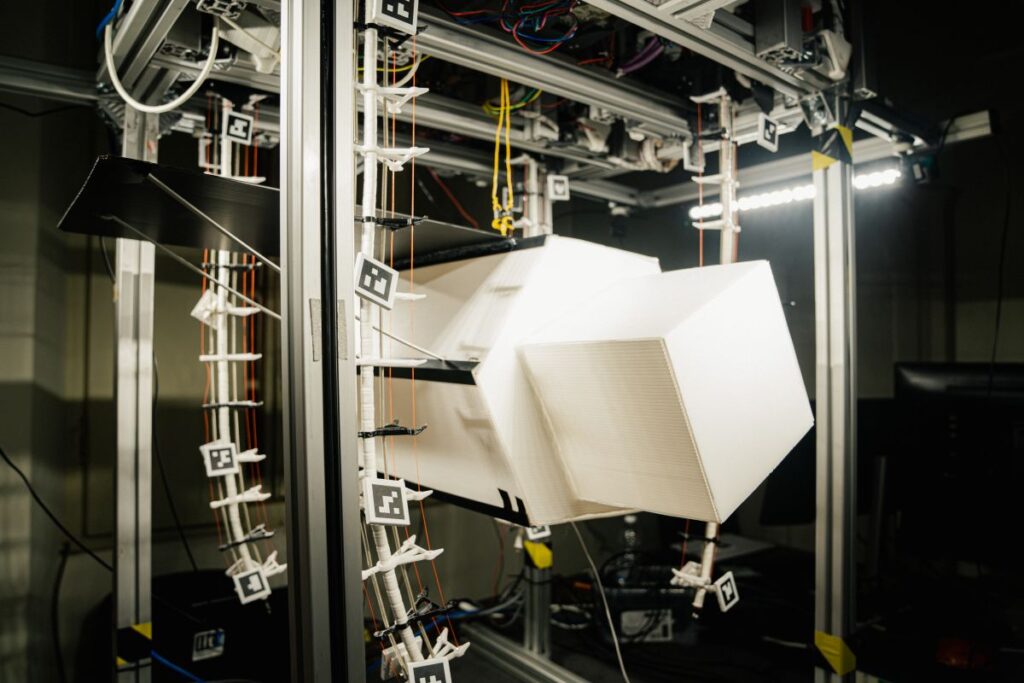
Le caratteristiche di flessibilità e smorzamento attivo degli impatti sono state pensate per rispondere alla necessità di garantire un alto livello di sicurezza nelle manovre di avvicinamento, aggancio, ispezione e manutenzione di satelliti o di altri corpi presenti nello spazio, come i detriti in orbita. Il prototipo presentato a Busalla è costituito da quattro bracci flessibili in grado di agganciarsi fra loro per assicurare la presa sicura del satellite o dell’oggetto target. Questa configurazione multibraccio rappresenta uno degli elementi distintivi del sistema, perché consente al robot di coordinare più punti di contatto e di gestire in modo controllato l’interazione con oggetti che possono trovarsi in condizioni dinamiche difficili.
Il primo prototipo ROSAIA presentato a Busalla
Il primo prototipo di ROSAIA è stato realizzato con bracci lunghi circa 75 centimetri. Il design, tuttavia, è stato concepito per essere scalabile su differenti taglie, in funzione delle future applicazioni. Questo significa che l’architettura del robot potrà essere adattata a esigenze operative diverse, mantenendo il principio di base della manipolazione flessibile e dello smorzamento degli impatti. La struttura del sistema è pensata per combinare capacità meccaniche e controllo intelligente. La presa sicura dell’oggetto target non dipende soltanto dalla conformazione fisica dei bracci, ma anche dalla capacità di coordinare i movimenti del robot in relazione al satellite sul quale è installato e all’oggetto da manipolare.
Intelligenza artificiale per il controllo autonomo delle operazioni spaziali
Uno degli aspetti centrali di ROSAIA è l’impiego dell’IA nella gestione delle operazioni. L’architettura di controllo basata su intelligenza artificiale dialoga con il satellite sul quale il robot è a bordo, con l’obiettivo di gestire i movimenti e garantire la sicurezza complessiva di tutto il sistema operante e operato. Questa capacità è particolarmente rilevante nelle attività spaziali, dove la precisione delle manovre e la gestione del rischio sono determinanti. L’intelligenza artificiale fornirà anche la possibilità di rendere autonomo il sistema nelle operazioni a cui ROSAIA sarà applicabile, contribuendo alla gestione coordinata dei bracci e alla sicurezza delle fasi di contatto, presa e manipolazione.
Un prototipo per satelliti, detriti spaziali e future applicazioni in orbita
Con la presentazione al Festival dello Spazio di Busalla, ROSAIA entra per la prima volta nella dimensione pubblica come prototipo di robotica spaziale pensato per rispondere a problemi concreti delle attività in orbita. La manipolazione di satelliti operativi, satelliti non più funzionanti e detriti in orbita richiede tecnologie capaci di operare in assenza di gravità e di attrito, con controllo preciso dell’assetto, della velocità e dell’interazione fisica con il target. Il sistema sviluppato da IIT con il finanziamento di ASI si inserisce in questo contesto come una piattaforma robotica multibraccio, flessibile e controllata da intelligenza artificiale, concepita per migliorare la sicurezza delle manovre di avvicinamento, aggancio, ispezione e manutenzione. Il prototipo presentato a Busalla rappresenta così un passo nello sviluppo di robot spaziali in grado di supportare future applicazioni di In-Orbit Servicing e gestione di oggetti nello spazio.

 Vuoi ricevere le notifiche sulle nostre notizie più importanti?
Vuoi ricevere le notifiche sulle nostre notizie più importanti?