
Il panorama della robotica ha compiuto un passo decisivo verso una nuova forma di destrezza grazie allo studio pubblicato su Nature Communications da Xiao Gao e colleghi. Mentre la maggior parte delle mani robotiche odierne cerca di emulare l’anatomia umana, considerata l’apice della funzionalità, i ricercatori hanno identificato proprio nella struttura antropomorfa alcuni limiti intrinseci, come l’asimmetria che permette la presa da un solo lato e il vincolo fisico a un braccio stazionario. La nuova invenzione rompe questi schemi presentando una mano robotica staccabile, reversibile e capace di locomozione autonoma, aprendo orizzonti inediti per l’automazione industriale, i servizi e l’esplorazione di spazi angusti.
Il superamento dei limiti dell’anatomia umana
La mano umana, pur essendo straordinaria, soffre di un’asimmetria che richiede spesso complesse rotazioni del polso per manipolare oggetti in diverse orientazioni. Lo studio sottolinea come la dipendenza da un singolo pollice opponibile limiti la capacità di eseguire compiti che richiedono simmetria o modularità. Per ovviare a ciò, il team guidato da Gao ha sviluppato un’architettura a simmetria biassiale con dita identiche e uniformi. Questo design permette a qualsiasi coppia di dita di funzionare come un sistema “pollice-indice”, garantendo una reversibilità che consente alla mano di afferrare oggetti da entrambi i lati del palmo senza dover riposizionare l’intero braccio meccanico.
Locomozione e manipolazione in un unico modulo
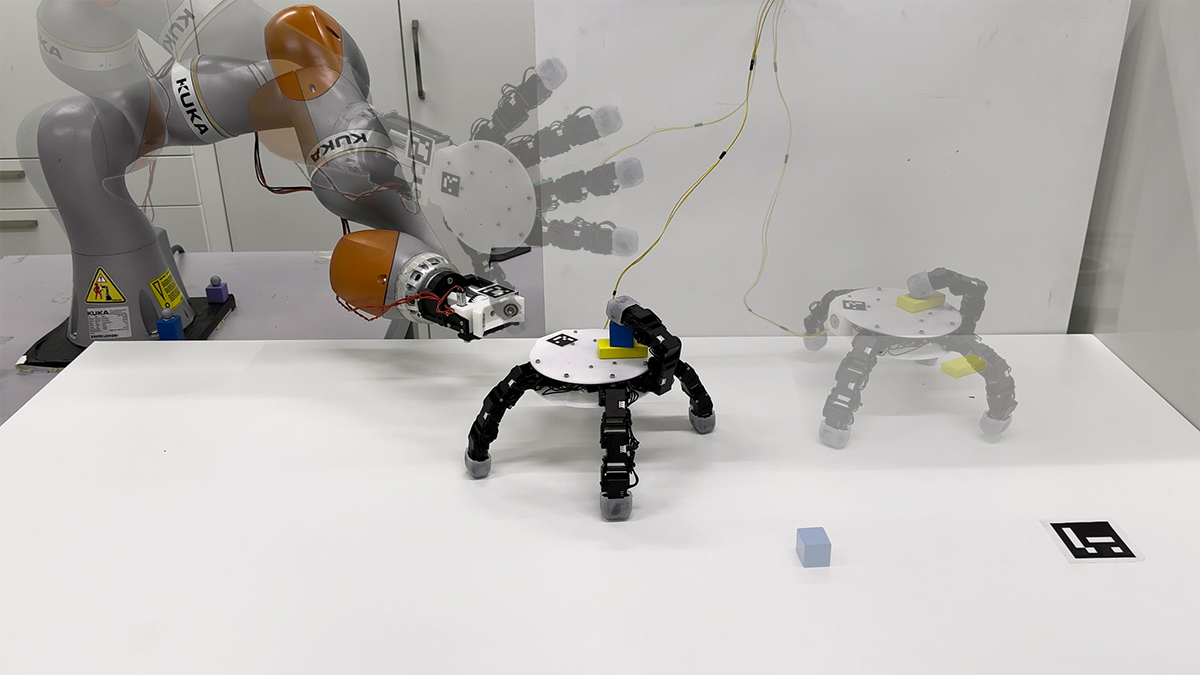
L’innovazione più sorprendente risiede nella capacità della mano di distaccarsi dalla sua base montata sul braccio (un Kuka iiwa 7) per trasformarsi in un’unità mobile indipendente. Grazie a un meccanismo a vite motorizzato e all’uso di magneti al neodimio per l’allineamento, la mano può separarsi dal polso, cadere su una superficie e iniziare a strisciare come un crostaceo. Questa capacità di “loco-manipolazione” permette al robot di raggiungere oggetti situati al di fuori dello spazio di lavoro del braccio stazionario, come ad esempio sotto un mobile o all’interno di scaffalature dense. Una volta recuperato l’oggetto, la mano è in grado di strisciare a ritroso e riagganciarsi autonomamente al braccio robotico, mantenendo la presa sicura.
Prestazioni e ottimizzazione tramite algoritmi genetici
Il team ha testato versioni della mano a cinque e sei dita, con un palmo di 160 mm di diametro. Le dita, realizzate con componenti stampati in 3D e motori Dynamixel, offrono uno spazio di manovra più che doppio rispetto a quello umano, permettendo di replicare tutti i 33 tipi di presa della tassonomia standard di Feix. In termini di potenza, la mano può sostenere stabilmente oggetti fino a 2 kg. La progettazione non è stata lasciata al caso: i ricercatori hanno utilizzato Algoritmi Genetici (GA) e generatori di pattern centrali (CPG) per ottimizzare il numero di dita, la loro posizione sul palmo e le andature di camminata, scoprendo che una configurazione a 4 o 5 dita offre il miglior equilibrio tra efficienza di movimento e prevenzione delle collisioni interne.
Verso un futuro di versatilità aumentata
Oltre alle applicazioni industriali e di soccorso in scenari di disastro, dove la mano potrebbe navigare in spazi confinati come tubazioni o macerie, lo studio suggerisce potenziali impieghi nel campo delle protesi e dell’aumento degli arti. La capacità del cervello umano di adattarsi a dita soprannumerarie indica che questa configurazione non tradizionale potrebbe essere integrata efficacemente per potenziare le abilità umane. Sebbene i test attuali si siano concentrati su oggetti leggeri e superfici piatte, la ricerca futura punta ad adattare gli algoritmi di controllo per gestire carichi più pesanti e integrare tessuti morbidi nella struttura per migliorare la conformità passiva e la mimesi biologica.
 Vuoi ricevere le notifiche sulle nostre notizie più importanti?
Vuoi ricevere le notifiche sulle nostre notizie più importanti?